FROM CONCEPT TO REALITY: USING DIGITAL TWINS FOR ROAD SAFETY AUDITS
By: Dr. Suliman A. Gargoum., Ph.D., P.Eng.
Introduction
Creating digital replicas of road infrastructure (also known as digital twins) has the potential to transform all disciplines of transportation engineering including design, planning, and safety. Whether it is the use of 3D collision or condition diagrams, digitalization of road safety audits, or real- time safety analytics, the existence of a virtual 3D replica of the road and its surrounding environment at a millimeter-level accuracy provides road safety professionals with a unique diagnostic tool. Besides improving the efficiency of conducting road safety audits (RSAs), digital twins provide road safety professionals with insights that are not attainable using conventional tools. In this article, I provide an overview of the imminent paradigm shift that digital twins are causing in the road safety industry with a focus on road safety audits.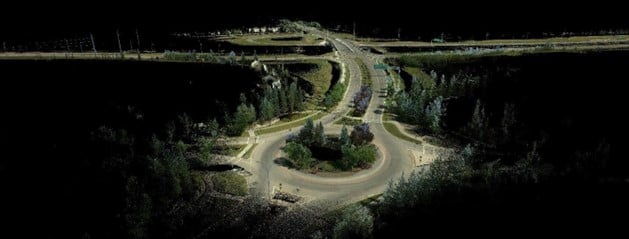 Figure 1: High Resolution Mobile LiDAR Scan of an Intersection
Figure 1: High Resolution Mobile LiDAR Scan of an Intersection
Road Safety Audits and In Service Road Safety Reviews represent a core element of the safety diagnosis process defined in the Highway Safety Manual [1]. The process is defined by the US Federal Highway Administration as “a formal safety performance examination of an existing or future road or intersection by an independent, multidisciplinary team. It qualitatively estimates and reports on potential road safety issues and identifies opportunities for improvements in safety for all road users” [2]. Conducting such reviews requires physical on-site presence and multiple rounds of data collection. Although attempts to review Google street view and satellite imagery have improved the efficiency of some aspects of the audit process, it remains a tedious task that is prone to subjectivity and human error.
The Definition of a Digital Twin
A digital twin is defined as a virtual replica (digital representation) of a real world object. This replica is identical to the actual object in almost every aspect (a twin). A digital twin often consists of a physical and a functional component. The physical component captures the static 3D model of the object, while the functional component captures the dynamic or varying aspect of the object. Although, it is common that the functional component is collected and updated in real-time,
collection of functional data at a higher latency is not uncommon. In fact, there is a wide debate in the literature on whether real-time updates of information is required for a digital twin with some researchers seeing this as a critical component and others concluding otherwise. [3]
In the case of road safety audits, the physical component of the digital twin is the element of primary concern and can be updated at higher latency. The value of that digital twin, or lifelike 3D model in RSAs, lies in the efficiency in which it can be created and the extent to which it is able to mimic the real road corridor or intersection. This is particularly important when such models are used to measure and extract safety critical information such as sight distances, slopes, etc.
Capturing the Digital Twin of Road Infrastructure
The technology to create digital twins of civil infrastructure including roads and highways has matured significantly over the past two decades. This has resulted in remote sensing tools such as mobile Light Detection and Ranging (LiDAR) technology, as well as spherical and satellite imagery that can create highly detailed digital model of road infrastructure in a single drive or flyover of a road. Furthermore, Internet of Things (IoT) sensors and cloud computing technology has provided professionals with the tools that can capture and emit real-time information about the performance and conditions of infrastructure. This could include structural stress and strain data on a bridge or traffic information on a road. In addition to the high efficiency in which a digital model of a road can be captured, the data is collected at a millimetre level of precision. In other words, measuring information in such a 3D replica represents real measurements to the nearest millimetre.
 Figure 2: High Resolution Mobile LiDAR Scan of a Highway Corridor
Figure 2: High Resolution Mobile LiDAR Scan of a Highway Corridor
One drawback of efficient data collection is that this often results in a large amount of data that becomes challenging to process in a timely manner. This has been one of the most significant challenges that entities looking to utilize such information for transportation applications, including RSAs, have faced. Nonetheless, thanks to the emergence of AI technology the efficiency of processing and interacting with the data has improved dramatically. This has included using AI for object detection [4], data segmentation [5,6], or automated extraction of geometric features such as cross sections [7,8], sight distances [9,10], and curve attributes [11].
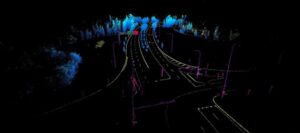 Figure 3: Digital Twin of a Road Broken into Road Features using AI
Figure 3: Digital Twin of a Road Broken into Road Features using AI
Advantages of Digitalization for Road Safety Audits
There are numerous advantages of digitalizing road safety audits and in-service road safety reviews. This includes but is not limited to,
- Increasing the efficiency of the diagnosis process: A road safety audit often requires a team of multiple experts to visit the site to conduct the review, which is a time-consuming process. With the existence of the digital twin, a thorough virtual inspection of the sight could be conducted in advance creating significant time savings. The digital twin also facilitates efficient network-level assessments, which means many more locations can be evaluated in significantly less time, instead of reviewing one site a day you could review a dozen.
- Higher accuracy and more details: Although an extremely high-level of accuracy is not a prerequisite of road safety audits and reviews, accessibility to such an unprecedented level of detail opens new perspectives to the audit team and provides them with new insights. For instance, the ability to measure the height of a guardrail every 5m along a 20km corridor provides the audit team with precise information on where the deficiencies, if any, may lie. While the height of the guardrail at one location might meet requirements, this may not be the case 50m or 100m down or upstream.
- Digital annotations and eliminating subjectivity: The virtual nature of a digital replica of a site provides the audit team with the ability to annotate any observations inside the 3D model, which ensures that other project participants can both review and provide their comments on any observations. Besides enhancing collaboration, such an approach helps eliminate subjectivity by enabling audit team members to view issues from each other’s perspective while providing comments.
- 3D visualizations: The two-dimensional nature of traditional collision and condition diagrams deprives the safety diagnostic team of a critical third dimension, which could hide important information regarding the poor safety record at a particular location.
- Infinite site visits: One of the most powerful aspects of digitalization of RSAs is the ability to conduct infinite site visits at no additional cost. This helps the audit team verify and validate
their observations. This is particularly important when there is disagreement among the audit team regarding a critical issue. Such technology facilitates revisiting the virtual site to either rule out the issue or confirm its existence.
- Record keeping: Another critical element of digitalization of RSAs is the ability to keep a digital record of all reviews and audits that have taken place. The audit team is also able to extract screenshots of the virtual model highlighting the issue. Instead of relying on photos taken on site or historic design drawings, the digital model provides the audit team with comprehensive evidence that can be kept in the archive or used for future audits.
 Figure 4: Virtual Measurement of Curb Height in the Cloud
Figure 4: Virtual Measurement of Curb Height in the Cloud
Challenges to Digitalization for Road Safety Audits
- Inability to Assess Certain Aspects Digitally: While digital twins can replicate physical and geometric aspects of road infrastructure with high accuracy, certain factors such as traffic operations, road user interactions, and human behavior require augmenting the physical component of the twin with the operational component, which requires real time updates. I elaborate on research exploring this integration in the following
- High Initial Costs: One of the main reasons transportation agencies are reluctant to adopt digital twins is the relatively high initial cost required. The development and deployment of digital twins can involve substantial upfront costs for acquiring technologies such as LiDAR, IoT sensors, and advanced computing resources. For some organizations, these costs may pose a barrier to adoption. With costs of hardware dropping significantly over the past decade many entities, including small municipalities, have started adopting such technology.
- Learning Curve for Stakeholders: The adoption of digital twin technology requires training and upskilling for engineers, auditors, and other stakeholders. This learning curve represents another barrier that has caused some reluctance among certain entities. Although such a challenge could have some impacts on early adopters, the technology has now reached a stage where cloud computing facilities and AI tools have helped reduce the educational burden significantly.
The Future
While everything discussed in this article to this point is technology that already exists in the field, the future holds even more promise. With the emergence of autonomous vehicles, and assuming there are high penetration rates for such vehicles, there is a potential for updates to infrastructure digital twins to be crowdsourced. In fact, even traffic trajectory data for all road users could be updated in real-time paving the path towards real-time dynamic safety monitoring and evaluation [12,13].
References
- National Research Council (US). Transportation Research Board. Task Force on Development of the Highway Safety Manual, & Transportation Officials. Joint Task Force on the Highway Safety Manual. (2010). Highway safety manual (Vol. 1). AASHTO.
- FHWA (2023) Road Safety Audits (RSA), Road Safety Audits (RSA) | FHWA. Available at: https://highways.dot.gov/safety/data-analysis-tools/rsa/road-safety-audits-rsa (Accessed: 14 December 2024).
- Liu, M., Fang, S., Dong, H., & Xu, C. (2021). Review of digital twin about concepts, technologies, and industrial applications. Journal of manufacturing systems, 58, 346-361.
- Paramasivam, M. E., Perumal, S., & Pathmanaban, H. (2024, February). Revolutionizing Road Safety: AI-Powered Road Defect Detection. In 2024 3rd International conference on Power Electronics and IoT Applications in Renewable Energy and its Control (PARC) (pp. 147-152). IEEE.
- Lin, Y. C., & Habib, A. (2022). Semantic segmentation of bridge components and road infrastructure from mobile LiDAR data. ISPRS Open Journal of Photogrammetry and Remote Sensing, 6, 100023.
- Zhou, S., Canchila, C., & Song, W. (2023). Deep learning-based crack segmentation for civil infrastructure: Data types, architectures, and benchmarked performance. Automation in Construction, 146, 104678.
- Gargoum, S. A., El-Basyouny, K., Froese, K., & Gadowski, A. (2018). A fully automated approach to extract and assess road cross sections from mobile LiDAR data. IEEE Transactions on Intelligent Transportation Systems, 19(11), 3507-3516.
- Holgado-Barco, A., Gonzalez-Aguilera, D., Arias-Sanchez, P., & Martinez-Sanchez, J. (2014). An automated approach to vertical road characterisation using mobile LiDAR systems: Longitudinal profiles and cross-sections. ISPRS Journal of Photogrammetry and Remote Sensing, 96, 28-37.
- Gargoum, S. A., & Karsten, L. (2021). Virtual assessment of sight distance limitations using LiDAR technology: Automated obstruction detection and classification. Automation in Construction, 125, 103579.
- Ma, Y., Zheng, Y., Cheng, J., & Easa, S. (2019). Real-time visualization method for estimating 3D highway sight distance using LiDAR data. Journal of Transportation Engineering, Part A: Systems, 145(4), 04019006.
- Shalkamy, A., Karsten, L., Gargoum, S., & El-Basyouny, K. (2020). A framework to detect horizontal curves and assess their geometric properties from remotely sensed point clouds. International Journal of Remote Sensing, 41(21), 8328-8351.
- Essa, M., & Sayed, T. (2019). Full Bayesian conflict-based models for real time safety evaluation of signalized intersections. Accident Analysis & Prevention, 129, 367-381.
- Fu, C., & Sayed, T. (2022). Bayesian dynamic extreme value modeling for conflict-based real-time safety analysis. Analytic methods in accident research, 34, 100204.